MAN Steam Turbine (666X1024)

MAN steam turbine (666X1024)
Source: http://i.imgur.com/zpdpNqs.jpg
More Posts from Hq-tech and Others

![Blade Of A Wind Turbine Positioned For Installation [1280×960]](https://64.media.tumblr.com/c90a1302b634c15574e042f6a5c0cce4/tumblr_oo6bb7kf8U1ujyzsuo1_500.jpg)
Blade of a wind turbine positioned for installation [1280×960]
Source: https://openpics.aerobatic.io/
![A Water Meter [1992×1478]](https://64.media.tumblr.com/f951485f683f1033bbeb2bed5418a9a6/tumblr_olh5g738DZ1ujyzsuo1_500.jpg)
A Water Meter [1992×1478]
Source: https://openpics.aerobatic.io/

More at Industry Tap



Optimal traction on the fly with White Crow tire pressure adjusting hubs
実用車用でパンク防止の為のポンプ機能付きのハブあったけど、積極的に空気圧を変えたいFATならではなのかな。 ハンヴィーみたいだ。
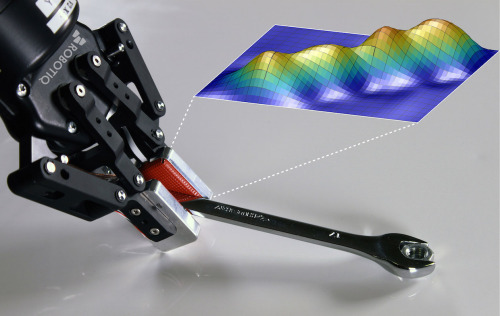
Why Tactile Intelligence Is the Future of Robotic Grasping
This is a guest post. The views expressed here are solely those of the author and do not represent positions of IEEE Spectrum or the IEEE.
The simple task of picking something up is not as easy as it seems. Not for a robot, at least. Roboticists aim to develop a robot that can pick up anything—but today most robots perform “blind grasping,” where they’re dedicated to picking up an object from the same location every time. If anything changes, such as the shape, texture, or location of the object, the robot won’t know how to respond, and the grasp attempt will most likely fail.
Robots are still a long way off from being able to grasp any object perfectly on their first attempt. Why do grasping tasks pose such a difficult problem? Well, when people try to grasp something they use a combination of senses, the primary ones being visual and tactile. But so far, most attempts at solving the grasping problem have focused on using vision alone.
IEEE Spectrum

15.06.30


some piston-porn

(via 7b10919ae4b3dbfc910a0eab69a33c53.jpg (1000×789))
-
 karlystopper reblogged this · 4 years ago
karlystopper reblogged this · 4 years ago -
 guardyaningxs-blog liked this · 6 years ago
guardyaningxs-blog liked this · 6 years ago -
 shadowystudentpaperworld reblogged this · 7 years ago
shadowystudentpaperworld reblogged this · 7 years ago -
 theskyhighatrist liked this · 9 years ago
theskyhighatrist liked this · 9 years ago -
 blownnitro reblogged this · 9 years ago
blownnitro reblogged this · 9 years ago -
blownnitro liked this · 9 years ago
-
 gonzalezmanuelr liked this · 9 years ago
gonzalezmanuelr liked this · 9 years ago -
 jeffzie reblogged this · 9 years ago
jeffzie reblogged this · 9 years ago -
 24-7-tech-blog reblogged this · 9 years ago
24-7-tech-blog reblogged this · 9 years ago -
 iunderstandyourpointe liked this · 9 years ago
iunderstandyourpointe liked this · 9 years ago -
 go-with-honor reblogged this · 9 years ago
go-with-honor reblogged this · 9 years ago -
 taaaaacos reblogged this · 9 years ago
taaaaacos reblogged this · 9 years ago -
 villamachineassociatesinc liked this · 9 years ago
villamachineassociatesinc liked this · 9 years ago -
mister-blik reblogged this · 9 years ago
-
mister-blik liked this · 9 years ago
-
 jeteflinguedessus reblogged this · 9 years ago
jeteflinguedessus reblogged this · 9 years ago -
bluebyankee liked this · 9 years ago
-
vicroberts24 liked this · 9 years ago
-
 farmfarmer liked this · 9 years ago
farmfarmer liked this · 9 years ago -
martianxy-blog liked this · 9 years ago
-
 alldeutch reblogged this · 9 years ago
alldeutch reblogged this · 9 years ago -
 hq-tech reblogged this · 9 years ago
hq-tech reblogged this · 9 years ago -
 pixxced liked this · 9 years ago
pixxced liked this · 9 years ago -
 bracco08 liked this · 9 years ago
bracco08 liked this · 9 years ago -
 mrjohnhurt liked this · 9 years ago
mrjohnhurt liked this · 9 years ago -
 machinetoolcommerce reblogged this · 9 years ago
machinetoolcommerce reblogged this · 9 years ago -
machinetoolcommerce liked this · 9 years ago
-
jeffzie liked this · 9 years ago
-
 betarev3 reblogged this · 9 years ago
betarev3 reblogged this · 9 years ago -
 campbell-soup reblogged this · 9 years ago
campbell-soup reblogged this · 9 years ago -
campbell-soup liked this · 9 years ago
-
163nmb reblogged this · 9 years ago
-
 ezmoer liked this · 9 years ago
ezmoer liked this · 9 years ago