Why Tactile Intelligence Is The Future Of Robotic Grasping
Why Tactile Intelligence Is the Future of Robotic Grasping
This is a guest post. The views expressed here are solely those of the author and do not represent positions of IEEE Spectrum or the IEEE.
The simple task of picking something up is not as easy as it seems. Not for a robot, at least. Roboticists aim to develop a robot that can pick up anything—but today most robots perform “blind grasping,” where they’re dedicated to picking up an object from the same location every time. If anything changes, such as the shape, texture, or location of the object, the robot won’t know how to respond, and the grasp attempt will most likely fail.
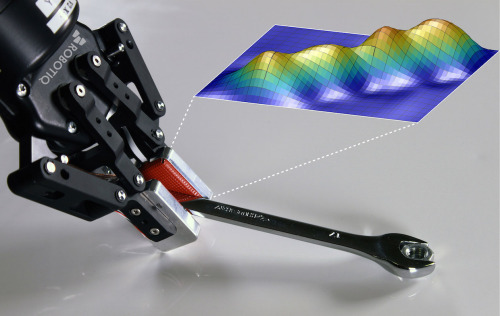
Robots are still a long way off from being able to grasp any object perfectly on their first attempt. Why do grasping tasks pose such a difficult problem? Well, when people try to grasp something they use a combination of senses, the primary ones being visual and tactile. But so far, most attempts at solving the grasping problem have focused on using vision alone.
IEEE Spectrum
More Posts from Hq-tech and Others

ZF’s 9-Speed transmission on display at their North American HQ
Source: https://openpics.aerobatic.io/


Tech art





by Atsushi Koyama, via io9.

(via p6230816.jpg (4288×3216))



BMW S1000RR Engine, Transmission, Induction and Exhaust System
1 Liter, ~200HP
Turning out a few custom grinds out on crankshafts today.
That little extra that you do that sets you apart from the others,counts.

Rivet. Rivet.

Door in Abandoned Factory | unknown credit
(via Pinterest • The world’s catalog of ideas)

Compressor for a helicopter turbine. Machined from a solid block of titanium.
Source: https://imgur.com/6FP01Vr
-
 ellswips reblogged this · 7 months ago
ellswips reblogged this · 7 months ago -
 latincruizzersworld liked this · 1 year ago
latincruizzersworld liked this · 1 year ago -
 damagedhistory-2 liked this · 5 years ago
damagedhistory-2 liked this · 5 years ago -
 wildtides liked this · 5 years ago
wildtides liked this · 5 years ago -
 talentforu-blog reblogged this · 6 years ago
talentforu-blog reblogged this · 6 years ago -
 dingdongtoolong reblogged this · 6 years ago
dingdongtoolong reblogged this · 6 years ago -
 jorderich liked this · 7 years ago
jorderich liked this · 7 years ago -
 tekwoolee liked this · 7 years ago
tekwoolee liked this · 7 years ago -
 anxvu reblogged this · 7 years ago
anxvu reblogged this · 7 years ago -
anxvu liked this · 7 years ago
-
 beastttmc liked this · 7 years ago
beastttmc liked this · 7 years ago -
 caliguladasstiefelchen-blog liked this · 8 years ago
caliguladasstiefelchen-blog liked this · 8 years ago -
 sonofreddoinverno liked this · 8 years ago
sonofreddoinverno liked this · 8 years ago -
 stellathetumbler reblogged this · 8 years ago
stellathetumbler reblogged this · 8 years ago -
stellathetumbler liked this · 8 years ago
-
 murik liked this · 8 years ago
murik liked this · 8 years ago -
 mnzaxel reblogged this · 8 years ago
mnzaxel reblogged this · 8 years ago -
 sheenaispunkrocker liked this · 8 years ago
sheenaispunkrocker liked this · 8 years ago -
 enginigger liked this · 8 years ago
enginigger liked this · 8 years ago -
 randomasmninja reblogged this · 8 years ago
randomasmninja reblogged this · 8 years ago -
 acemate8 liked this · 8 years ago
acemate8 liked this · 8 years ago -
 companioncube76 reblogged this · 8 years ago
companioncube76 reblogged this · 8 years ago -
 because-yah liked this · 8 years ago
because-yah liked this · 8 years ago -
 didyousaydragons liked this · 8 years ago
didyousaydragons liked this · 8 years ago -
 alpha-tequila-uncle reblogged this · 8 years ago
alpha-tequila-uncle reblogged this · 8 years ago -
alpha-tequila-uncle liked this · 8 years ago
-
 junaipa-moved liked this · 8 years ago
junaipa-moved liked this · 8 years ago -
 shinygoku liked this · 8 years ago
shinygoku liked this · 8 years ago -
 burrito-boii liked this · 8 years ago
burrito-boii liked this · 8 years ago -
 megamaam reblogged this · 8 years ago
megamaam reblogged this · 8 years ago -
 prairial reblogged this · 8 years ago
prairial reblogged this · 8 years ago -
 radar174 liked this · 8 years ago
radar174 liked this · 8 years ago -
 tobyvansten reblogged this · 8 years ago
tobyvansten reblogged this · 8 years ago -
jesterjoe45-blog liked this · 8 years ago
-
babakrostami-blog liked this · 8 years ago
-
 cadtutorials-blog reblogged this · 8 years ago
cadtutorials-blog reblogged this · 8 years ago -
cadtutorials-blog liked this · 8 years ago
-
 reluctantzombi-blog reblogged this · 8 years ago
reluctantzombi-blog reblogged this · 8 years ago -
 the-nomadic-writer reblogged this · 8 years ago
the-nomadic-writer reblogged this · 8 years ago -
jimivictoria liked this · 8 years ago
-
 glassofocean liked this · 8 years ago
glassofocean liked this · 8 years ago -
ludmila199 liked this · 8 years ago
-
 safetyphoto liked this · 8 years ago
safetyphoto liked this · 8 years ago -
 ambient-entropy liked this · 8 years ago
ambient-entropy liked this · 8 years ago